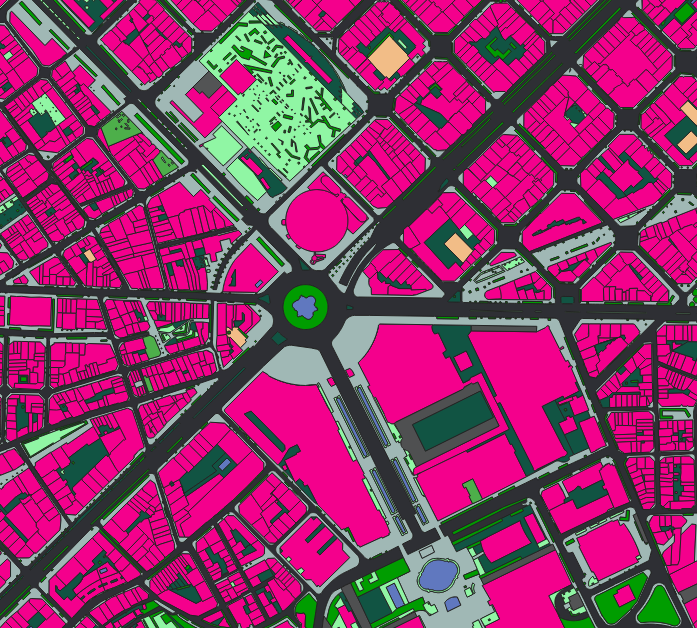
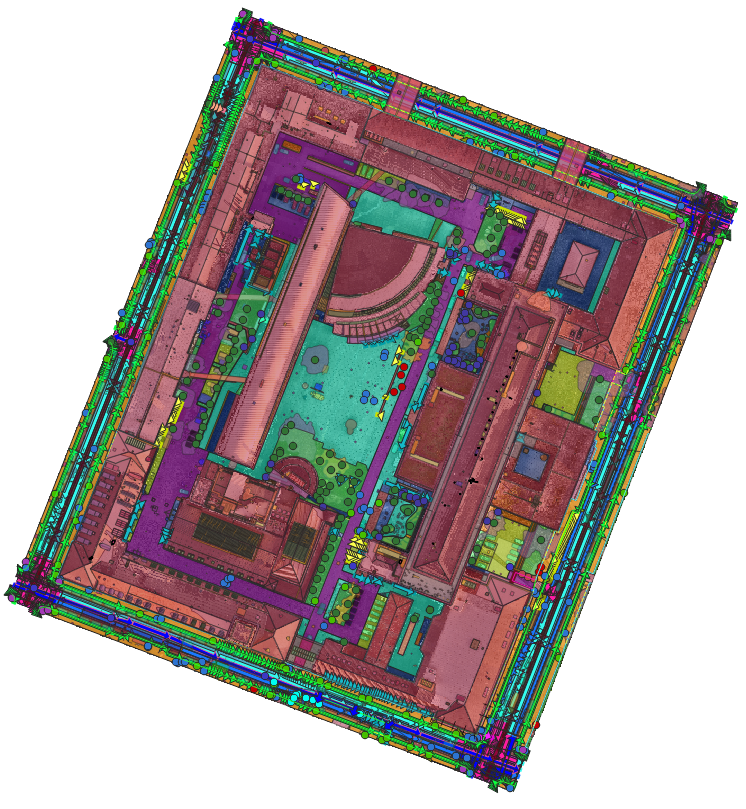
Nazru’s AI platform was deployed to automatically detect and classify roadside infrastructure elements into five distinct categories: curbstone, fence, guardrail, planar border between paved and unpaved area, and pole. This project provided a comprehensive digital inventory of linear and point features essential for road asset management, safety analysis, and autonomous navigation.
The Challenge
The client lacked an up‑to‑date, spatially accurate map of roadside infrastructure. Manual field surveys were costly, time‑consuming, and often incomplete. There was no automated method to distinguish between different feature types (e.g., curbstone vs. guardrail) or to capture the precise boundary between paved and unpaved surfaces.
The Nazru Solution
Nazru’s platform integrated high‑resolution aerial or mobile mapping imagery with deep learning models. Our algorithms automatically detected and classified the following five feature classes:
Curbstone – raised edges separating roadway from sidewalk or gutter