Project Overview
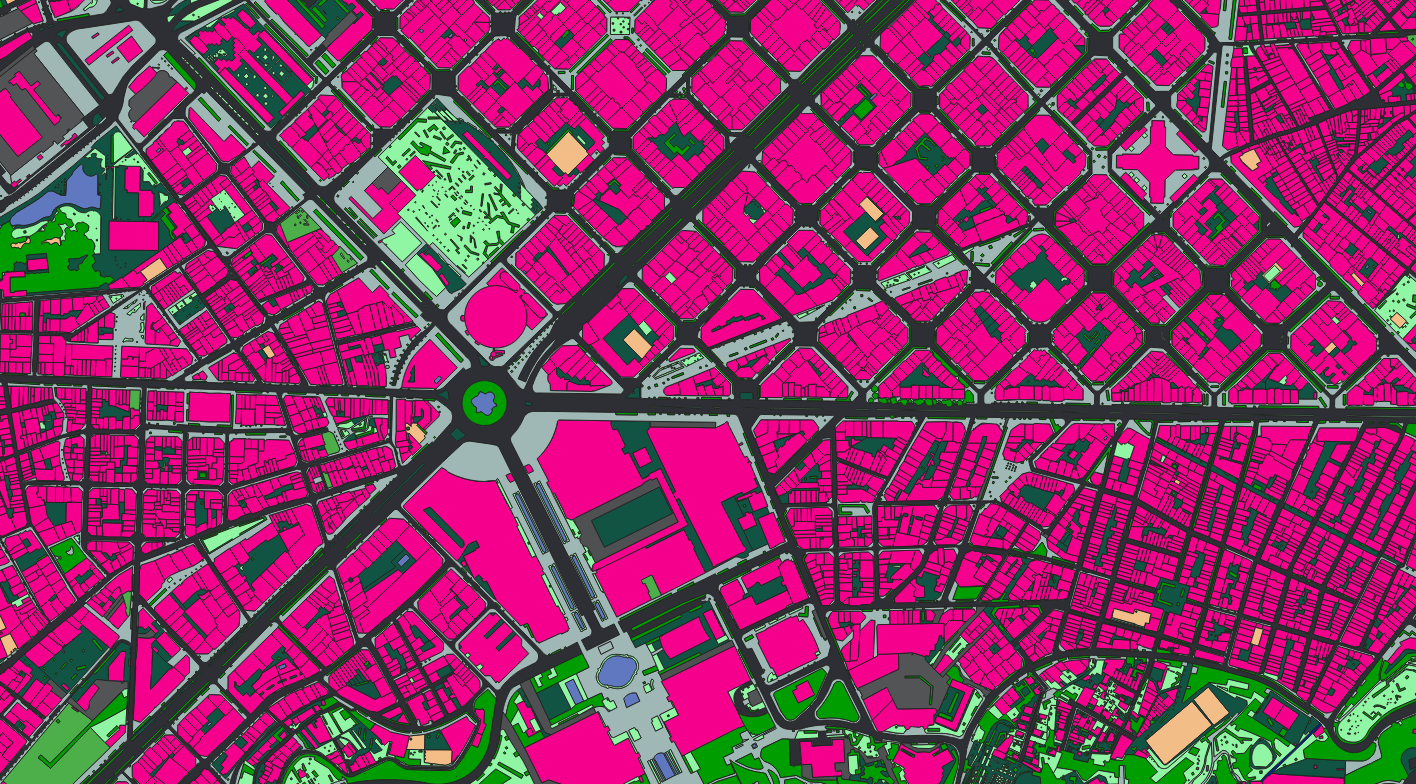
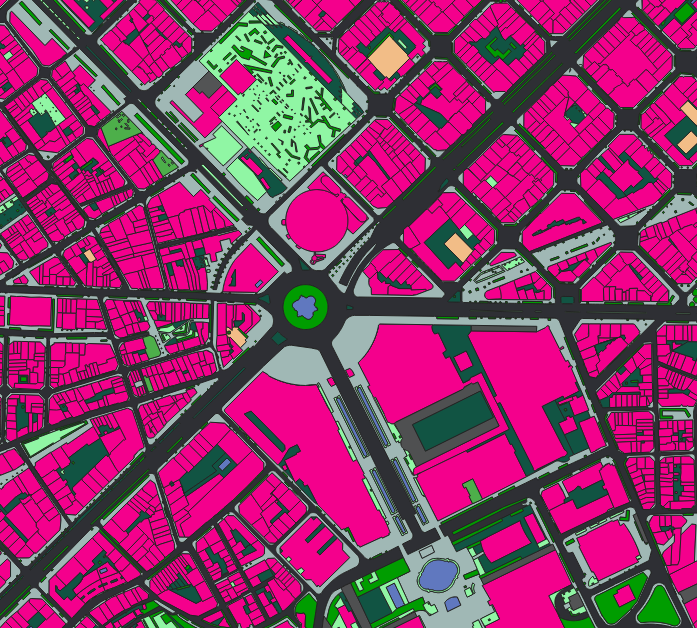
Nazru’s AI platform was deployed in Barcelona, Spain, to automatically map land cover and transportation features into 13 polygon classes. This project involved classifying the entire project area into: building, road, driveway, water, sport‑ground, pavement, bridge, sidewalk, bareland, forest, parking, railway, and grass.
The Challenge
The city of Barcelona required a high‑resolution, polygon‑based land cover inventory for urban planning, environmental monitoring, and infrastructure management. Traditional methods (manual digitisation or low‑resolution land use maps) could not provide the detailed separation of road, driveway, sidewalk, pavement, parking, railway, and various natural and man‑made surfaces. An automated, scalable solution was needed.
The Nazru Solution
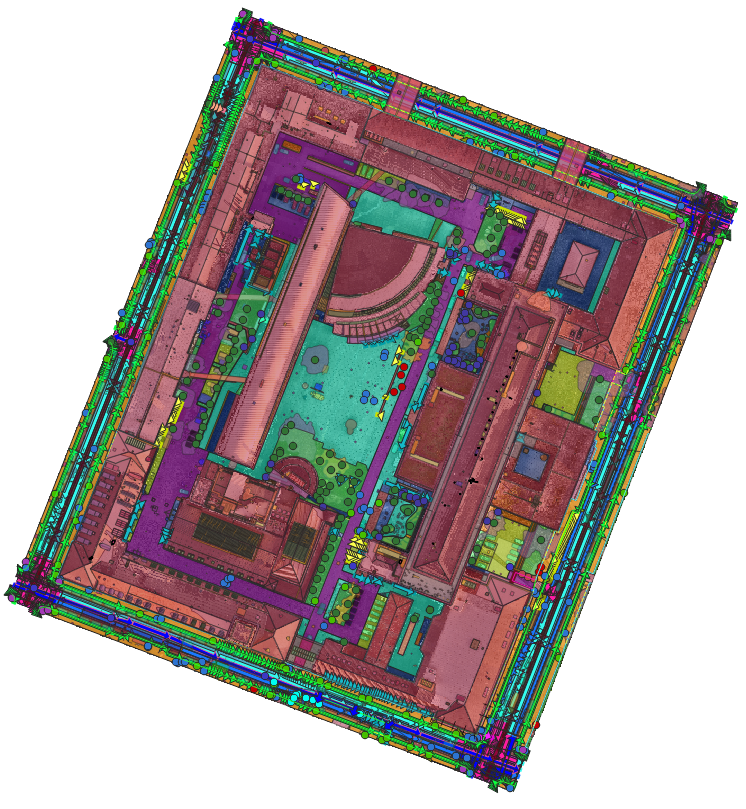
Nazru’s platform integrated high‑resolution satellite and aerial imagery with deep learning models for semantic segmentation. Our algorithms automatically classified every pixel (and then vectorised into polygons) into one of 13 classes:
All outputs were generated as clean polygons (no raster or line outputs) with full attribution.